用它就够了!开源的驾驶辅助系统

openpilot介绍
openpilot是一个开源的驾驶辅助系统。目前,openpilot 执行自适应巡航控制 (ACC)、自动车道居中 (ALC)、前方碰撞警告 (FCW) 和车道偏离警告 (LDW) 的功能,适用于越来越多的受支持汽车品牌、车型和车型年份。此外,在使用 openpilot 时,基于摄像头的驾驶员监控 (DM) 功能会提醒分心和睡着的驾驶员。查看更多关于车辆集成和限制的信息。
在车内的专用设备上运行
要在汽车中使用 openpilot,您需要做四件事
- 运行此软件的受支持设备。
地址:https://comma.ai/shop/products/three
介绍:
此设备是第四代定制硬件,设计用于您的汽车。它具有双凸轮 360° 视野,加上一个窄凸轮,可以发现远处的物体。三台 1080p 摄像头具有 120 dB 的动态范围,比领先的电动汽车制造商领先两代。它像手机一样连接,具有 Wi-Fi、LTE 和更好的高精度 GPS。
- 这个设备的设置过程允许用户输入自定义软件的 URL。URL openpilot.comma.ai 将安装 openpilot 的发布版本。要安装 openpilot master,您可以使用 installer.comma.ai/commaai/master,将 commaai 替换为另一个 GitHub 用户名可以安装一个 fork。
- 200 多辆受支持的汽车之一。我们支持本田、丰田、现代、日产、起亚、克莱斯勒、雷克萨斯、讴歌、奥迪、大众等。如果您的汽车不受支持,但具有自适应巡航控制和车道保持辅助,它就能够运行 openpilot。
- 连接到您的汽车的汽车程序。
在电脑上运行
所有 openpilot 服务都可以在 PC 上照常运行,无需特殊硬件或汽车。您还可以在记录或模拟数据上运行 openpilot 以开发或试验 openpilot。
使用 openpilot 的工具,您可以绘制日志、回放驱动器并观看全分辨率摄像机流。
您还可以使用 CARLA 模拟器在模拟中运行 openpilot 。这允许 openpilot 在您的 Ubuntu 机器上驾驶虚拟汽车。整个设置应该只需要几分钟,但确实需要一个不错的 GPU。
如果连接到网络摄像头和安全带,运行 openpilot 的 PC 也可以控制您的车辆。
安全和测试
- openpilot 遵守 ISO26262 指南。
- openpilot 具有在每次提交时运行的软件在环测试。
- 执行安全模型的代码存在于 panda 中,并且是用 C 编写的,有关更多详细信息,请参阅代码严谨性。
- panda 有软件在环安全测试。
- 在内部,我们有一个硬件在环 Jenkins 测试套件,用于构建和单元测试各种流程。
- panda 有额外的硬件在环测试。
- 我们在包含 10 个设备的测试柜中运行最新的 openpilot,不断重播路线。
目录结构
.
├── cereal # The messaging spec and libs used for all logs
├── common # Library like functionality we've developed here
├── docs # Documentation
├── opendbc # Files showing how to interpret data from cars
├── panda # Code used to communicate on CAN
├── third_party # External libraries
├── pyextra # Extra Python/ target=_blank class=infotextkey>Python packages
└── system # Generic services
├── camerad # Driver to capture images from the camera sensors
├── clocksd # Broadcasts current time
├── hardware # Hardware abstraction classes
├── logcatd # systemd journal as a service
└── proclogd # Logs information from /proc
└── selfdrive # Code needed to drive the car
├── assets # Fonts, images, and sounds for UI
├── athena # Allows communication with the App
├── boardd # Daemon to talk to the board
├── car # Car specific code to read states and control actuators
├── controls # Planning and controls
├── debug # Tools to help you debug and do car ports
├── locationd # Precise localization and vehicle parameter estimation
├── loggerd # Logger and uploader of car data
├── manager # Daemon that starts/stops all other daemons as needed
├── modeld # Driving and monitoring model runners
├── monitoring # Daemon to determine driver attention
├── navd # Turn-by-turn navigation
├── sensord # IMU interface code
├── test # Unit tests, system tests, and a car simulator
└── ui # The UI
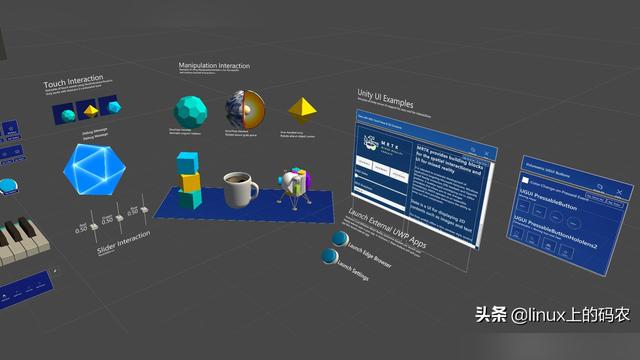
示例图


-END-
开源协议:MIT license
开源地址:
https://github.com/commaai/openpilot